
RCR-mini pro motory řady 400.
Regulátor vznikl ze stejného důvodu jako spínač, do začátku bylo třeba pořídit regulátory pro tři
modely lodí, takže koupě hotových regulátoru by mohla vyjít až na 3000,- korun. Což je celkem dost na první vyzkoušení.
A to by se mohlo stát že by to kluky nechytlo, tak by koupené skončily v šuplíku.
Popis:
Při hledání vhodného spínače v různých internetových zákoutích jsem narazil na regulátor na
stránce
http://homepages.paradise.net.nz/bhabbott/esc.html.
. Regulátor je sice bez reverzu, takže s lodí nelze couvat, ale jako první
regulátor na pohrání s loďkou to stačí, pořád lepší než jen zapnuto vypnuto. Díky
tomu že nemá zpětný chod tak je jednoduchý na stavbu a i plošný spoj je jedoduchý.
Bez problému si jej postavili kluci (10 a 13) jako svoji první konstrukci a fungoval
na první zapojení.
Po sestavení regulátoru jsem zjistil že zabírá později a má rychlý start. Což způsobovalo že se s
lodí nedalo pomalu pojíždět. Tak jsem se znova podíval na původní stránky a zjistil že je to tak.
Regulátor je v původní verzi použit pro letadlo a tam jsou pomalé otáčky k ničemu, lodní šroub
pracuje přeci jen v hustším prostředí a tak stačí pohnout s lodí i při menších otáčkách.
Bohužel program je napsán pro procesor PIC, což není moje parketa. Takže, přestože je k dispozici
zdroják s include souborem, kde je vidět závislost výchylky na otáčkách, nebyl jsem schopen spustit překladač
s upraveným zdrojákem, tak jsem našel přímo ve programu tabulku a tu zeditoval a výsledek uložil jako hex.
Udělal jsem dva upravené programy jeden je lineární a druhý je upravený tak aby průběh výchylek ovladače
vyhovoval mému MONAKU.
Další úpravou kterou jsem udělal je vypuštění obvodu kontrolujícího napětí baterie. Důvody jsou dva.
Za prvé se mi nikdy nepodařilo nastavit tak aby vhodně fungoval s aku 6V Pb. A pak při ježdění na tento aku je
v případě poklesu napětí již loď výrazně pomalá a o stavu aku lze usuzovat s chování lodi.
V původní konstrukci je použit PIC12C509, tento brouk jde naprogramovat jen jedou. Takže po poradě s PICařem
jsem použil PIC12F509. Ten je zcela kompatibilní a pokud se při programování spleteme dá se vymazat a naprogramovat znova.
Regulátor používáme pro 400 motor, 6V Pb aku, bez přídavného chlazení, k plné spokojenosti mé i mých synů.
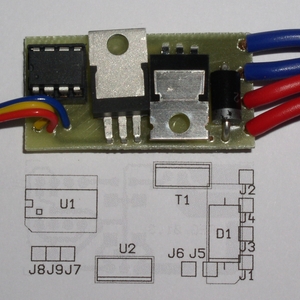
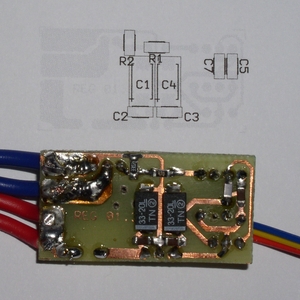
Takže ke stavbě:
Schéma:
|

|
| - | - |
|
|
| Verze HW 1.3 | ||||
| Hodnota | Typ | Počet | Pozice | Cena |
| CT47M/16V | Kondenzátor tantalový SMD | 2 | C1, C4 | 20,00 |
| 100nF | Kondenzátor SMD 1206 | 3 | C2, C3, C5 | 7,50 |
| 220pF | Kondenzátor SMD 1206 | 1 | C7 | 2,50 |
| 1N5822 | Dioda | 1 | D1 | 4,00 |
| 47 | Odpor SMD1206 | 1 | R1 | 2,00 |
| 33k | Odpor SMD1206 | 1 | R2 | 2,00 |
| IRL2203N | Tranzistor | 1 | T1 | 35,00 |
| PIC12F509 | Procesor | 1 | U1 | 38,00 |
| LM2940CT-5 / L4940V05 | Stabilizátor | 8 | U2 | 22,00 |
| PCKON 3 | Konektor | 1 | J1,J2,J3 | 5,00 |
| 136,00 | ||||
Software:
Software pochází z původních stránek, můžete použít
originální software
nebo moji úpravu pro MONAKO,
případně s lineárním průběhem.
Trošku problém je s naprogramováním, protože PIC není moje doména tak nemám pro
naprogramování návod, a ani nevím zda se dá postavit nějaký jednoduchý pro PonyProg.
Vzhledem k tomu že C508 je v PonyProgu tak určitě bude existovat i nějaký programátor pro F509
s jednoduchým zapojením jako PonyProg.
Já jsem použil pučený velký programátor kde jsem nastavil
konfigurační bity takto: __config _MCLRE_OFF & _CP_OFF & _WDT_ON & _IntRC_OSC.